바로가기 메뉴
본문 바로가기
푸터 바로가기
서울대학교
Register
로그인
Korean
English
Korean
Korean
English
LAB
MEMBERS
Professor
Current Students
PROJECT
Current Projects
Completed Projects
PUBLICATION
Journal Papers
Conference
TOOLS
TEACHING
PHOTOS
사이트맵
검색어를 입력해주세요.
TOP
TOOLS
Probe Vehicle
탑재된 단말기 및 장치들을 기반으로 차량의 주행정보를 수집하는 장비임
주행차량 정보 뿐만아니라 앞차와의 거리, 뒷차와의 거리 등 주변차량과의 관계 데이터도 수집 가능함
조사차량의 Auto Pilot 혹은 Smart Cruise Control 기능을 활용하면 2.5단계 수준 자율주행차의 주행정보도 수집 가능함
Driving Simulator
Driving Simulator는 Car-Following, Lane Changing, Gap Acceptance 등 미시 교통류 이론에 근거한 차량 이동 모형이 탑재되어, 가상의 환경하에서 주행하는 상황을 모사할 수 있도록 하는 장비임
교통공학연구실의 Driving Simulator는 피실험자가 운전하는 차량 뿐 아니라 그 차량으로 인한 주변 차량에 미치는 영향까지 파악할 수 있는 시뮬레이터임
Eye-Tracker
Eye-Tracker는 착용자의 시선을 추적하여 착용자 바라보는 지점을 시각적으로 나타낼 수 있는 장비임
EyeGuide S/W를 사용하여 사용자 보정, 세션 기록, 데이터 분석에 이르기까지 전체 테스트 프로세스를 관리할 수 있음
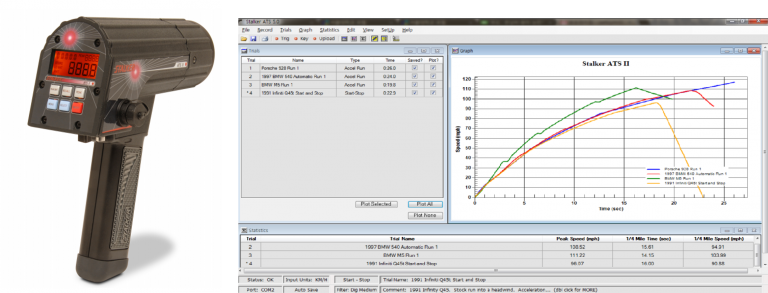
Speed Gun
Speed Gun은 Radar 방식으로 속도를 측정하는 장비로 차량(Car) 및 보행자 등의 이동속도 측정을 위하여 사용가능함
Windows S/W를 통하여, 이동 궤적의 속도와 가속도를 측정하여, 이동 궤적의 Dynamics를 Graphically 제공할 수 있음
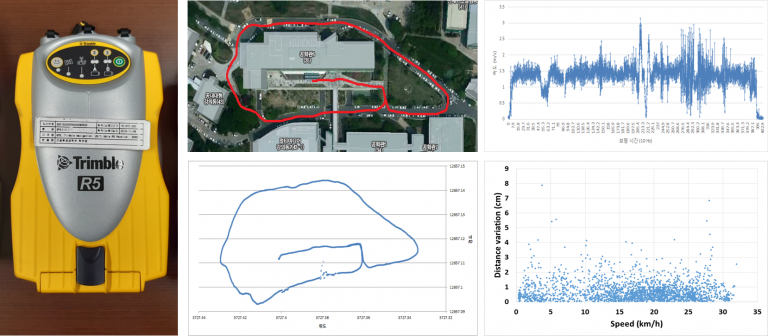
DGPS
DGPS는 전 세계적으로 널리 이용되고 있는 GPS의 위치 오차를 보정하기 위한 Tool로 전국에 분포되어 있는 기준국에서 생성되는 보정정보를 송신하여 GPS의 오차를 보정하여 1m 이내의 정확한 위치를 알 수 있게 해주는 장치임
DGPS는 날씨에 관계없이 정확한 위치를 구할 수 있으며 시간에 따른 위치 변화를 계량화하여 속도와 가속도를 제공함
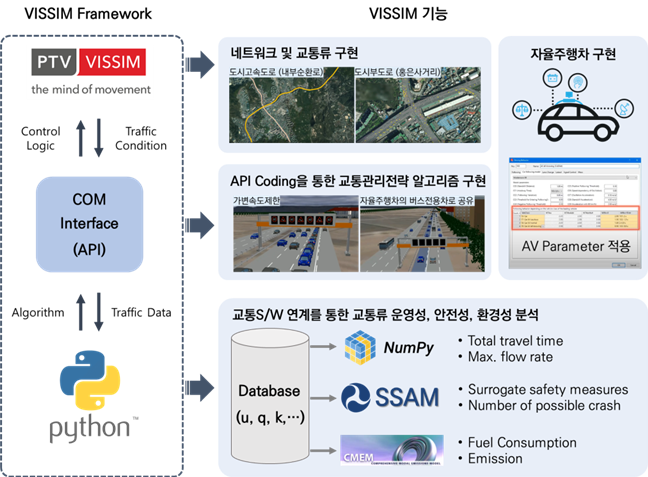
VISSIM
VISSIM은 PTV 社가 개발한 차량추종모형 기반의 Microsimulation으로 실제와 유사한 모형을 만들어 모의적으로 실험하는 것으로 교통운영, 대중교통, 교통안전, 교통류 해석 분야 등에 유용하게 활용되는 Tool임
교통공학연구실에서는 VISSIM, Com Interface, Python을 결합한 Framework를 구축하여 연구에 활용하고 있음
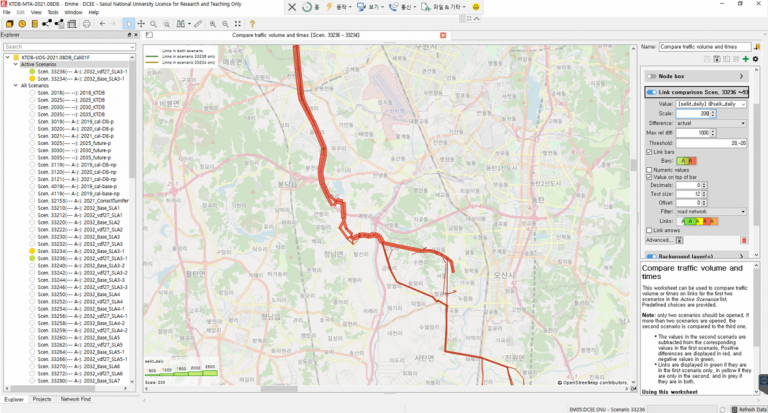
EMME
EMME는 거시교통시뮬레이션으로, 주어진 수단별 OD matrix를 활용하여 통행배정(trip assignment)를 수행하는 tool임
지도상에 도로 network를 편집할 수 있고, 시나리오별 통행배정 결과를 시각적으로 비교할 수 있음
도로사업의 수요를 추정하고 및 타당성을 조사하는 데 활용됨
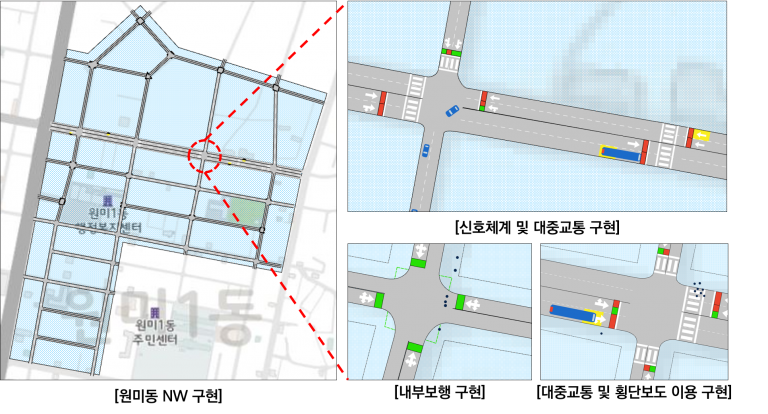
AIMSUN
교차로부터 도시전체에 이르기까지 다양한 N/W에서 Mobility를 시뮬레이션할 수 있는 Multi-resolution 모델링 Tool임
Aimsun Next를 사용하여 승용차, 자전거, 보행자, 대중교통을 하나의 플랫폼에서 모델링 하는 것이 가능함